Find out the current speed of the propellers, engines, landing gears, rotors and other wheels of your drone!
Designed by ThunderFly in Czechia
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
General Description TFRPM01 is an open-source frequency sensor tachometer intended for the measurement of the speed of rotational actuators on drones. The TFRPM01 sensor itself does not contain a sen…
Read More…TFRPM01 is an open-source frequency sensor tachometer intended for the measurement of the speed of rotational actuators on drones. The TFRPM01 sensor itself does not contain a sensing probe. It needs to be connected externally. This allows you to connect many different probes based on different technologies. For basic diagnostics, the sensor is equipped with an LED indicator that shows the logic state of the input pin.
TFRPM01 is supported by Pixhawk autopilots with up-to-date PX4 firmware. For the correct setting of the sensor, see the official documentation. The sensor is designed to be able to count high frequencies without overloading the autopilot CPU.
The sensor is based on I²C pulse counter IO PCF8583.
The I2C connector is a 4-pin JST-GH connector compliant with Pixhawk Reference Standards. The second I2C connector can be used as a thought-pass I2C output and allows to connection of another sensor on the same bus.
There can be up to two TFRPM sensors on one bus. The default sensor address is 0x50 and it can be changed to 0x51 by the use of soldering iron. A sensor with a different address is available on request.
For connecting the probe, the sensor is equipped with a standard three-pin header connector. The connector contains a power and signal pin. The order of pins is GND 5V Signal. It supports 5V TTL signals. The maximum pulse frequency of IO is 20 kHz with a 50% duty cycle. Maximal measured frequency and accuracy depend on the driver setting.
Hall-effect sensors (magnetically operated) are ideal for harsh environments, where dirt, dust, and water can contact the sensed rotor.
Many different hall-effect sensors are commercially available. For example, a 5100 Miniature Flange Mounting Proximity Sensor is a good choice.

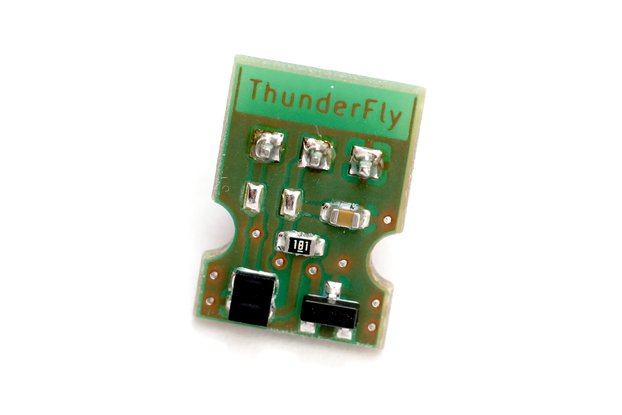
The optical sensor can also be used (and maybe is a better fit, depending on the measurement requirements). Both transmissive and reflective sensor types may be used for pulse generation. We suggest the TFPROBE01 reflective optical sensor, which is combined with optional magnetic sensing.

How to set up the TRRPM01 sensor with PX4 based autopilot is described in official documentation. PX4 driver acquires RPM frequency from the sensor and sends it as an internal uORB message. uORB message is logged in autopilot and translated to MAVLink message and can be received/visualized by a ground station (QGroundControl).

The sensor was tested with CUAV V5+ and CUAV Nano autopilot. Other PX4-based autopilots should be also supported with PX4 firmware.
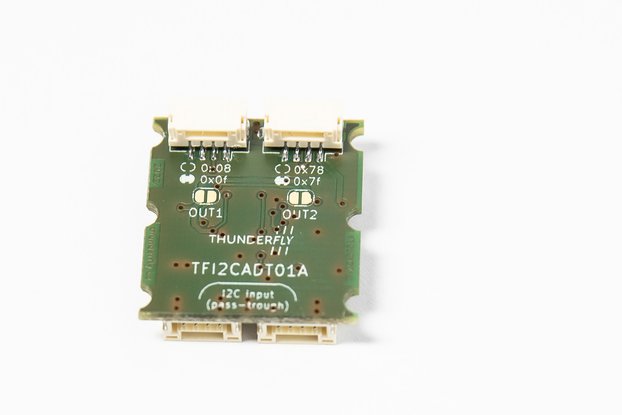
In applications where multiple TFRPM01 are needed, the TFI2CADT01 module could be used. That allows the connection of up to six TFRPM01s to a single I2C port.
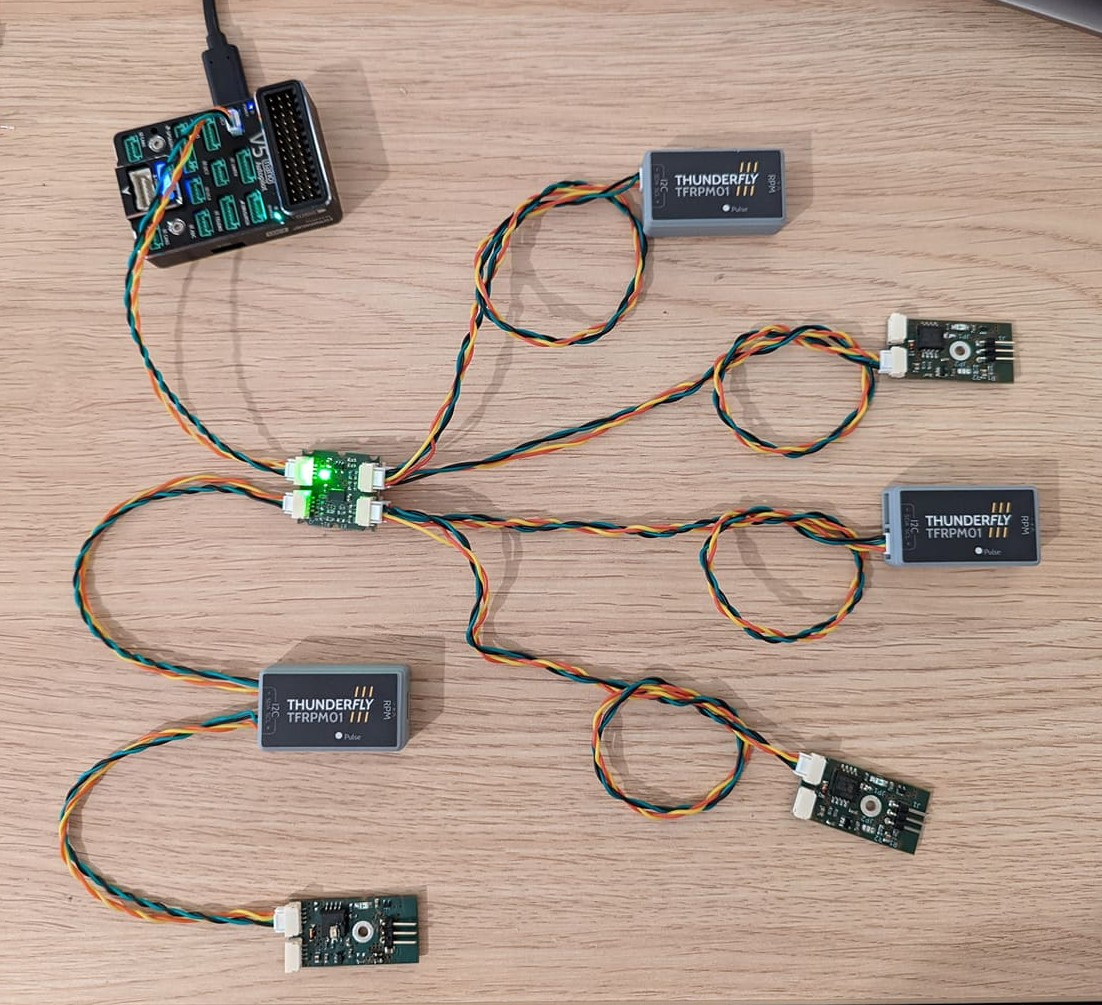
You may need to purchase additional I2C cables separately. We offer high-quality cables that are compatible with the Pixhawk standard and with a ThunderFly color scheme for easy signal type identification. ThunderFly cables are specifically designed with improved resistance to electromagnetic interference and a silicone insulator that makes them highly flexible.
The sensing probe is not included in the TFRPM01 sensor package. ThunderFly sells and has tested the following two probes, which can be directly connected to the TFRPM01 sensor board:
The product is gradually evolving and improving based on user requirements. Currently (as of 05/2023), the TFRPM01D revision is being shipped. In the development process, we keep backward compatibility, for example by keeping the same form factor or communication interface. The complete list of changes is in releases.
Roll-back to sticker version with a hole for the screw, to allow user disassembly.
Note: The TFRPM01D sensors shipped from 8. 5. 2023 does not have a hole in the bottom sticker for accessing the screw for disassembling the plastic case. To change the I2C device address or output voltage, it is necessary to remove the bottom sticker and unscrew the screw. (The bottom sticker is a sticker with a QR code)
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More

$451.95

$96.60
$105.80

$322.00
$31.05

$434.50

$109.25

$170.20
/i/085591/products/2023-05-07T19%3A17%3A33.294Z-EOSR9209-Edit.jpg?1683461914)