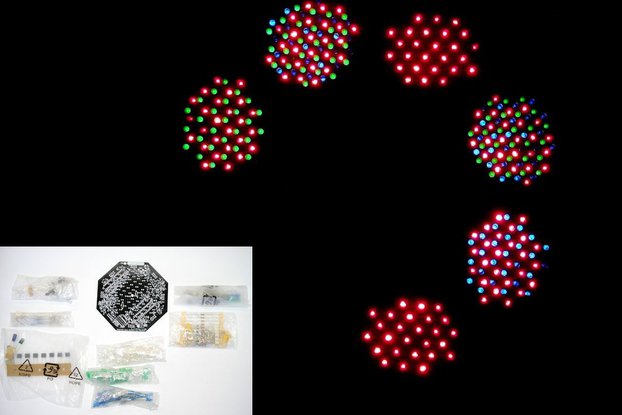
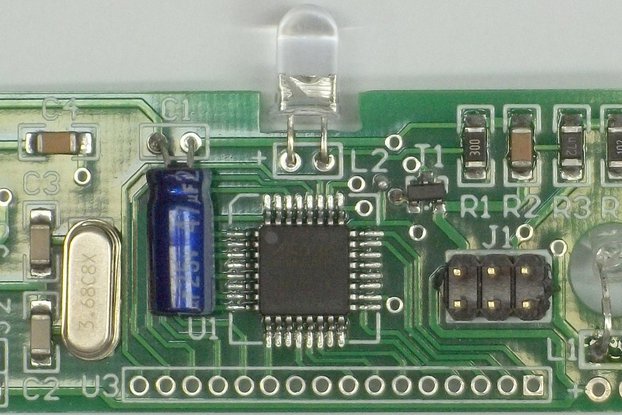
The robot chassis control board uses a PIC microcontroller to actuate relays connected to a robot chassis and detect input from sensors
Designed by Oscilloscope clocks in United States of America
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
$130.00

$265.00

$300.00

$250.00

$105.00
$275.00
$250.00
$175.00
/i/78064/products/2018-03-24T19%3A33%3A38.294Z-RBT1%20%281%29.jpg?1606306133)