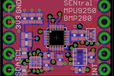
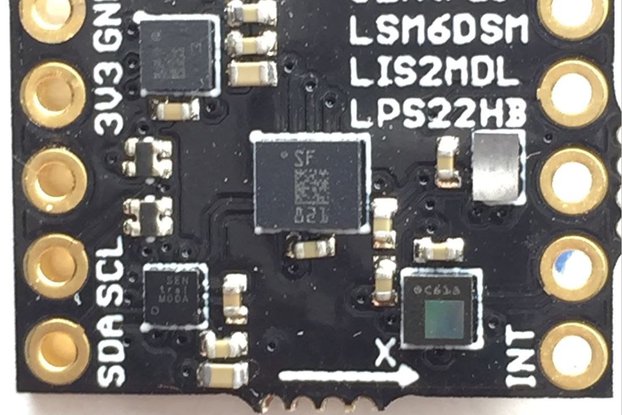
EM7180 Sensor Hub coupled with the MPU9250 IMU provides 2 degree heading accuracy!
Designed by Pesky Products in United States of America
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
$11.95
$35.95
$35.95
$49.95
$29.95
$19.95
$12.95
$19.95
/i/44691/products/2017-12-08T22%3A10%3A15.963Z-USFS.topp.jpg?1606306133)