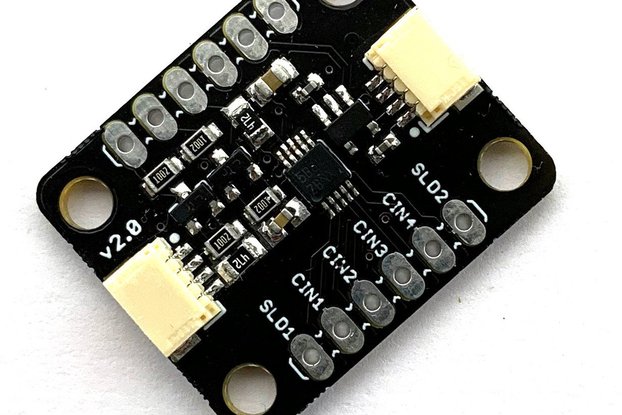
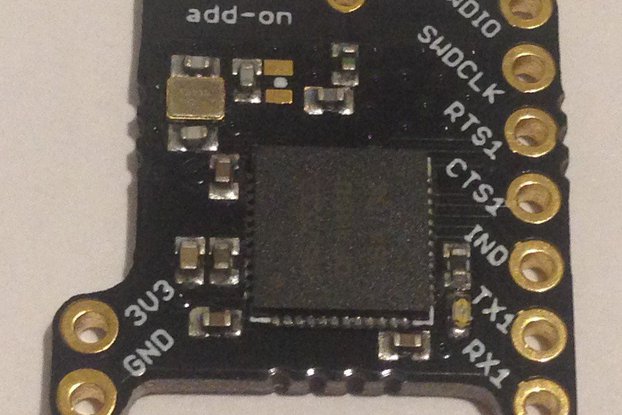
Add two or more LSM6DSM+LIS2MDL+LPS22HB motion sensors on the same I2C bus
Designed by Pesky Products in United States of America
This product is no longer available for sale.
The seller may be offering an improved version or it may be hanging out on the beach, enjoying the retired life.
$11.95
$35.95
$35.95
$49.95
$29.95
$19.95
$12.95
$19.95


/i/44691/products/2019-05-03T18%3A34%3A50.304Z-ChainableSTSensor.top.jpg?1606306133)