
$39.95
$79.95
$29.95
$17.95
$17.95

$79.95
$79.95
$11.95
$29.95
$49.95
$49.95
$79.95
One-man maker shop with a focus on appallingly small, value-added products. Specialties include motion sensing and motion control applications.
If you don't see what you want, let me know what it is, I might be able to help!
See here for my story: https://www.maker.io/en/interviews/2016/interview-with-kris-winer---pesky-products
No country selected, please select your country to see shipping options.
Ken | March 6, 2024
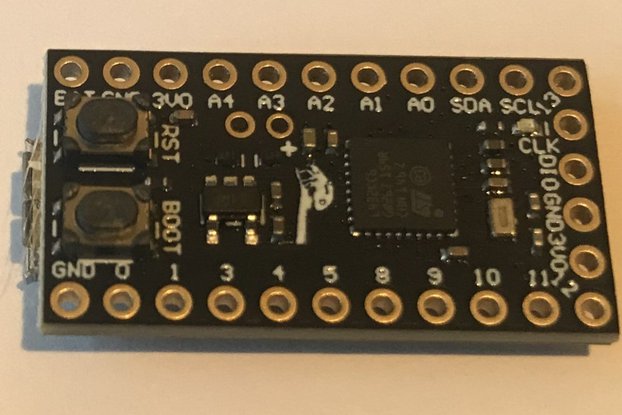
For Ladybug STM32L432 Development Board
Peter | Nov. 23, 2022
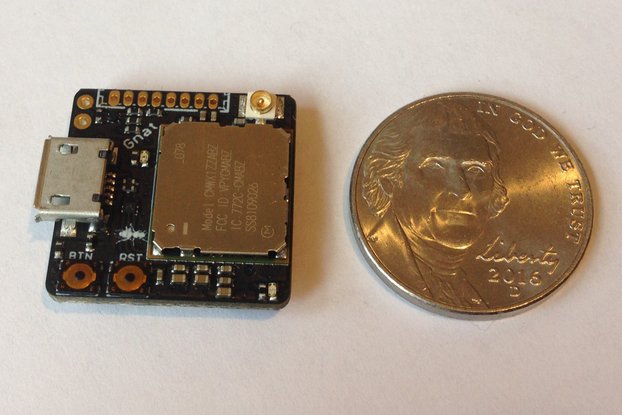
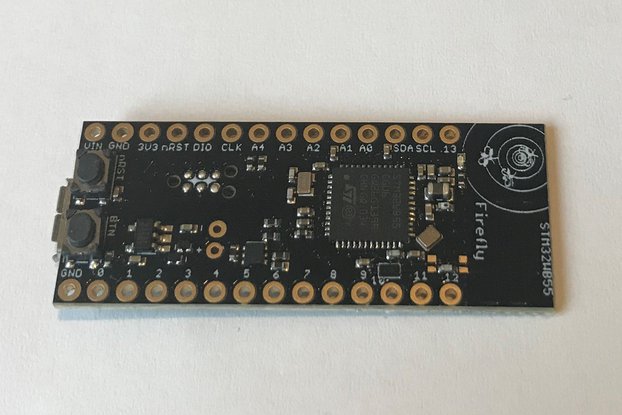
For Firefly BLE Development Board
Ekawahyu | Aug. 24, 2022
For Firefly BLE Development Board
Jc | June 18, 2021
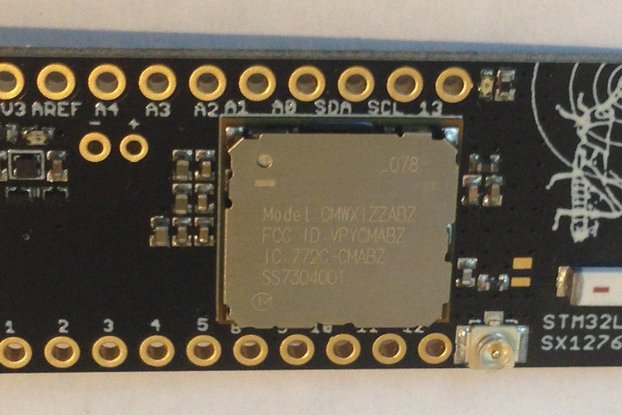
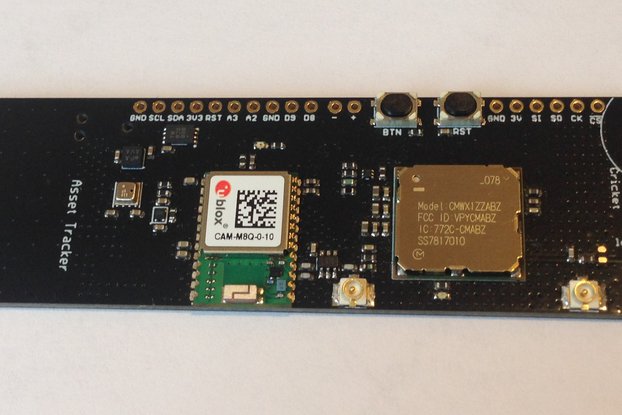
For Grasshopper LoRaWAN Development Board
Gerald | Jan. 22, 2021
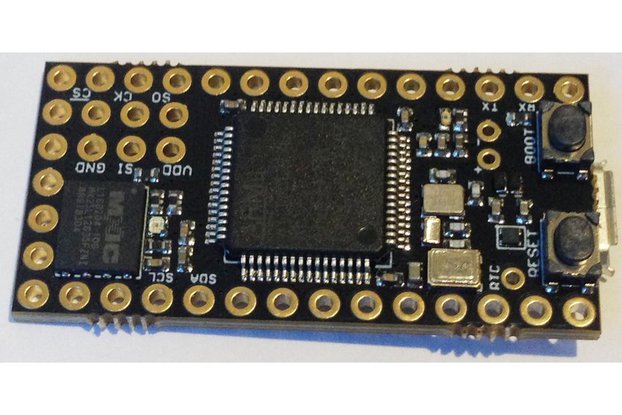
For Dragonfly STM32L476/96 Development Board