The Protractor is a proximity sensor that tells you the angle to nearby objects and open pathways.
Designed by Robogao LLC in United States of America
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
A lot of sensors can tell the distance to an object, but often times what you really need to know is the angle. Knowing the angle between your robot and nearby objects and open pathways is super usef…
Read More…A lot of sensors can tell the distance to an object, but often times what you really need to know is the angle. Knowing the angle between your robot and nearby objects and open pathways is super useful, allowing your robot interact with its environment in real time. Challenges like obstacle avoidance, maze solving, mini sumo, and others are so much easier when you know the angle. With a 180 degree field of view, the Protractor can tell you the angles to nearby objects as well as open pathways. Install the Protractor Library and with just a few lines of code, your robot can be running mazes or obstacle courses simply by following the open pathway sensed by the Protractor.
The Protractor works great for Mini Sumo robots and easily mounts to a Pololu Zumo robot shield (Version 1.x). Our software library contains example code for using the Protractor + Zumo for Mini Sumo matches as well as obstacle avoidance.
A detailed description on how the Protractor works and how to hook it up to your project is available here.
The Libray for Arduino has lots of examples to help get your project up and running. Download it at https://github.com/robogao/Protractor
The Protractor is an active infrared (IR) sensor. It measures the amount of light that bounces off nearby objects from different directions. A special algorithm processes the signals and calculates the angles to the objects it sees as well as the angles of the open paths. The Protractor will output the angles whenever requested by a microcontroller. It can be connected using either I2C or Serial. Our Arduino Library makes it easy to get the angles from the Protractor. The Protractor lets you know what it sees using its two blue LEDs. The brightness of the LEDs lets you quickly check how well the Protractor can see a nearby object.
![]()
Although the Protractor is not a distance measuring sensor, it does provide an indication of how visible an object is. When multiple objects or paths exist, knowing which object or path is most visible can help your robot decide which way to go.
Each Protractor comes with a Protractor circuit board, a stick of straight and right angle header and a capacitor. You will need to solder the header to the board. The capacitor will also need to be soldered if you wish to install it. Mounting hardware and hookup wires are not included.
The Protractor updates the angles every 15 milliseconds so your robot always has the latest information. While most proximity sensors have a very narrow view, the Protractor is designed to see a full 180 degrees in the plane of the board. When used indoors away from direct sunlight, the Protractor can generally see walls up to 35 to 40 cm (14 to16 in) away. A piece of 3” white PVC pipe can typically be seen 30 cm (12 in) away, and 1” white PVC pipe can typically be seen 20 cm (8 in) away. High levels of ambient infrared light will reduce the sensing range so shielding it from sunlight will keep it working at its best. The sensing range also depends on the amount of light reflected, so dark objects will have a reduced sensing range.

The Protractor is typically accurate to better than 10 degrees, with a slight taper in accuracy at the far ends of its angular range.
By default the Protractor scans every 15 milliseconds but can be set to scan slower or only when requested. Changing the refresh rate from 15 ms to 100 ms can reduce the average current from 85 ma to around 20 ma. The peak current draw of the Protractor is 860 ma and can be reduced to 200 ma or less by soldering the included capacitor to the board.
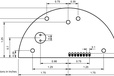
Diameter: 89mm (3.5 in) Thickness: 6.2mm (0.25 in) excluding header
The board has 5 mounting holes that accept 4-40 or 3mm machine screws for mounting. Nylon or other plastic screws or standoffs are recommended.
Power connections to Vin and GND should be connected as close as possible to the power source. For reliable operation in your project, it is recommended to bypass the microcontroller’s PCB and connect the Protractor’s Vin and GND pins directly to the output of the power supply.

The Protractor communicates with a master using either Serial Bus or I2C communication. Examples for using the Protractor with an Arduino are provided for both Serial and I2C. The Protractor has level shifters included on all communication lines and can be interfaced with either 5V or 3.3V microcontrollers.
To use the Protractor with an Arduino over I2C or Serial, connections must be made for Power and Communication.
I2C Connections:
| PROTRACTOR | UNO | LEONARDO | MEGA | DUE |
|---|---|---|---|---|
| GND | GND | GND | GND | GND |
| Vin | Vin | Vin | Vin | Vin |
| DG/DGND | GND | GND | GND | GND |
| VCC | 5V | 5V | 5V | 3.3V |
| SDA | SDA/A4 | SDA/2 | SDA/20 | SDA/20 |
| SCL | SCL/A5 | SCL/3 | SCL/21 | SCL/21 |
Serial Connections:
| PROTRACTOR | UNO | LEONARDO | MEGA | DUE |
|---|---|---|---|---|
| GND | GND | GND | GND | GND |
| Vin | Vin | Vin | Vin | Vin |
| DG/DGND | GND | GND | GND | GND |
| VCC | 5V | 5V | 5V | 3.3V |
| TX | RX | RX | RX | RX |
| RX | TX | TX | TX | TX |
Buy with confidence.
Our Tindie Guarantee protects your purchase from fraud. Learn More
/i/58158/products/2017-09-11T00%3A11%3A49.709Z-ProtractorTopView.png?1606306133)